在此頁面中,可將伺服驅動器的單位轉換為您的使用單位、反轉軸的方向、限制軸的移動範圍(極限開關)、設定軸的原點開關、和設定軸的最大和最小加速度、減速度與加加速度,若您的伺服驅動器在數位輸入中提供極限開關狀態,則在數位輸入啟用時將自動使用該狀態。
於專案設定窗格點選一個軸,然後點選設定窗格中的「設定」頁籤以開啟此頁。
傳送與讀取

「傳送」與「讀取」是相當彈性的功能按鍵,您可使用它們對 KINGSTAR 子系統的值進行讀寫。若您已建立一個新的設定工具專案,在硬體連接後,設定工具即自動將一系列設定寫入 KINGSTAR 子系統以供軸使用,而這些由 KINGSTAR 配置的設定適用於大多數的軸,有了這些設定後軸即可正確移動(非完全精準)。設定工具運作時會持續對顯示在設定工具介面上與儲存於子系統中的值進行比較,若您或其他應用程式改變了某些項目值,改變的項目將會被標註。欲將改變的值寫入子系統,需點選「傳送」,否則新值將不會被寫入;若已在某些欄位改變了值,但欲讀取在子系統中原來的值,可點選「讀取」。
當介面上顯示的值與儲存於子系統中的值不同時,「傳送」與「讀取」按鍵才會被啟用,點擊該按鍵後,設定工具將提醒您設定將會變更。
傳送:將新值套用到 KINGSTAR 子系統,點擊「傳送」以後,設定工具將提醒您設定將改變。
讀取:讀取 KINGSTAR 子系統的值,點擊「讀取」以後,設定工具將提醒您所讀取的值將會覆寫欄位中的值。
注意:若開啟設定工具專案,在硬體連接後,設定工具將使用先前儲存的設定。
注意:設定頁面中的「傳送」與「讀取」按鍵以及測試與調校頁面都是連動的,意旨若在任一頁面改變了與軸相關的某些設定,相關的改變將在其他頁面被標註。
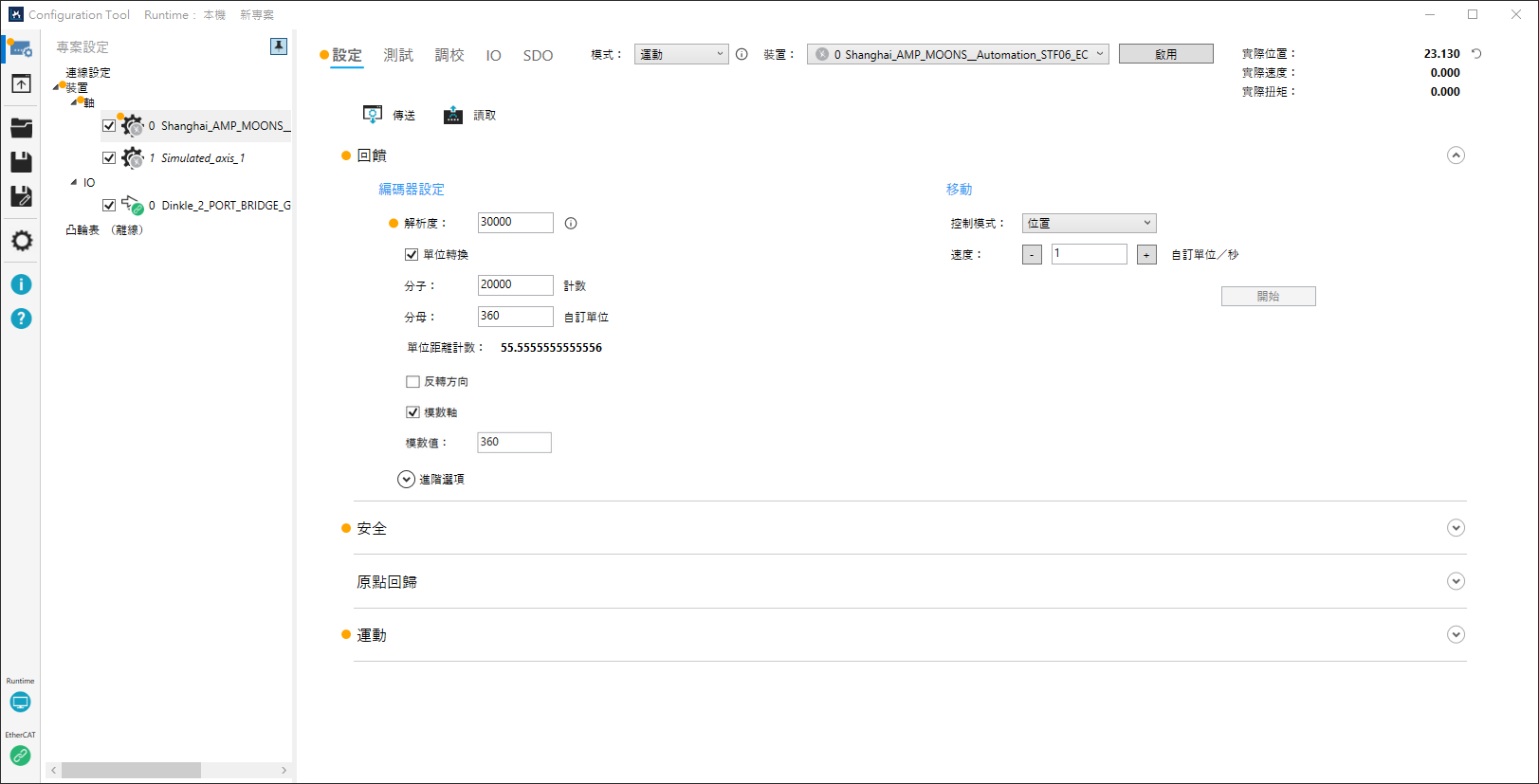
回饋提供單位轉換與反轉方向,可使用基本運動以測試機器的回饋是否適用於新的設定值。
編碼器設定若編碼器設定變更,設定工具將會提醒更改原點回歸、運動及 PID 設定的值。 解析度:連線軸的解析度。
單位轉換:啟用軸使用真實世界單位,改變單位將影響位置與速度。當取消勾選此功能,分子與分母將無法設定。 分子:將驅動器單位轉換為使用者單位。例如,若裝置為編碼器,通常分子是編碼器的解析度。 分母:將驅動器單位轉換為使用者單位。例如,若使用度數,因一旋轉為 360 度,則值將為 360。 單位距離計數:一個使用者單位的編碼器計數。 反轉方向:反轉軸的移動方向。 模數軸:選取以啟用模數軸。接著,在「模數值」輸入框中輸入一個值(例如:360)。
進階選項 驅動器速度單位與每秒計數比例:將驅動器的單位轉換率設定為軸使用的計數(脈衝)單位,若此值為一,則代表軸使用每秒計數。 反轉扭矩方向:反轉扭矩方向。 儲存與還原此欄位僅在「連線設定」頁面的在「軸設定」下勾選「儲存和還原位置偏移」選項時才會顯示。您可將「儲存和還原位置偏移」功能套用到每一個軸。關於「儲存和還原位置偏移」功能的設定方式,請參閱〈使用儲存和還原位置偏移功能〉。 儲存和還原位置偏移:選取此選項可將「儲存和還原位置偏移」功能套用至此軸。此選項預設為未選取,只有被勾選的軸,其位置偏移量才能在啟用此功能時被儲存或還原。 當 EtherCAT 中斷連線時,已儲存的偏移量會顯示在「儲存用於還原的偏移量」欄位。您可在必要時修改此偏移量。此處所修改的偏移量僅會寫入專案,不會寫入「位置偏移量檔案」。 移動測試軸對編碼器設定中的新設定值是否適用。 控制模式:在執行時設定軸的控制模式,此控制模式必須與目前存取模式相容,非所有軸都支援在運作時更改控制模式。
開始:開始執行。 |

安全設定極限開關以控制軸可移動的距離。
負極限負軟體極限:設定軸可到達的最遠負方向位置。 啟用負極限開關:啟用負軟體極限。
正極限正軟體極限:設定軸可到達的最遠正方向位置。 啟用正極限開關:啟用正軟體極限。
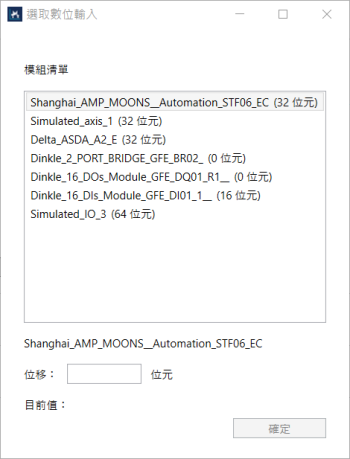
選取數位輸入視窗 點擊正/負極限中數位輸入的「編輯」按鍵後即出現「選取數位輸入」視窗。I/O 模組的長度為「預期長度」,詳細資訊請見 IO 頁面。
模組清單:可用的 I/O 模組清單。 位移:指定位元位移位置以讀取該位置的值。 目前值:從模組讀取的目前值。 |

原點回歸設定軸的原點回歸開關。
設定反轉 開/關:反轉感測器值,未勾選表示當感測器在高位(開)則被視為有觸動;勾選表示當感測器在低位(關)視為有觸動。 數位輸入:
驅動器回歸方法:使用伺服驅動器的原點回歸功能。更多關於伺服驅動器的原點回歸方法,請參照其使用說明書。 驅動器回歸偏移量:軸找到原點感測器後移動的距離。 |

運動
設定軸的運動參數。

加速度單位:設定軸的加速度與加加速度單位。
每秒單位數:加速度使用單位為每秒2,加加速度使用單位為每秒3。
延遲秒數:加速度之延遲時間(單位為秒),此設定用來決定當增加速度並從零加速到最大速度時插補所需的時間。
設定工具中所有的運動參數皆受單位轉換(回饋設定區域)與加速度單位 (設定 > 運動) 影響。更多關於加速度單位的運作方式請見:概念解說 > 運動曲線類型。
| 單位/秒 | 延遲(秒) | |
|---|---|---|
| 單位轉換 (開) |
目標/距離:使用者單位 速度:使用者單位/秒 加速度:使用者單位/秒2 減速度:使用者單位/秒2 加加速度:使用者單位/秒3 加加加速度:使用者單位/秒4 |
目標/距離:使用者單位 速度:使用者單位/秒 加速度:秒 減速度:秒 加加速度:秒 加加加速度:秒 |
| 單位轉換 (關) |
目標/距離:計數 速度:計數/秒 加速度:計數/秒2 減速度:計數/秒2 加加速度:計數/秒3 加加加速度:計數/秒4 |
目標/距離:計數 速度:計數/秒 加速度:秒 減速度:秒 加加速度:秒 加加加速度:秒 |
系統(安全與硬體)
將運動參數設定至軸,若伺服驅動器或馬達有安全性功能或限制,請將相關設定套用於此。
最高速度:軸的最大速度,設為零則沒有最大值的限制;設為其他值則最大速度將為所設定的值。
最低速度:軸的最小速度,設為零則沒有最小值的限制;設為其他值則最小速度將為所設定的值。
最大扭矩:軸的最大扭矩,設為零則沒有最大值的限制;設為其他值則最大扭矩將為所設定的值。
最小扭矩:軸的最小扭矩,設為零則沒有最小值的限制;設為其他值則最小扭矩將為所設定的值。
最高加速度:軸的最大加速度。
最高減速度:軸的最大減速度。
最高加加速度:軸的最大加加速度。
最高加加加速度:軸的最大加加加速度(加速度的變化)。
最大追蹤誤差:軸的最大追蹤誤差。
目標位置誤差:軸的位置錯誤,若目標位置與實際位置間的距離較此值小,則軸將被視為在目標位置而運動將停止。
應用程式
將參數設定至 KINGSTAR 應用程式
最高速度:最大速度,設為零則沒有最大值的限制;設為其他值則最大速度將為所設定的值。
重要:當更改加速度單位時,因每個運動曲線類型擁有自己的的單位,因此以下欄位的值亦會更改。
最高加速度:最大加速度,設為零則沒有最大值的限制;設為其他值則最大加速度將為所設定的值。
最高減速度:最大減速度,設為零則沒有最大值的限制;設為其他值則最大減速度將為所設定的值。
最高加加速度:最大加加速度。設為零則沒有最大值的限制;設為其他值則最大加加速度將為所設定的值。
最高加加加速度:最大加加加速度(加速度的變化),設為零則沒有最大值的限制;設為其他值則最大加加加速度將為所設定的值。
參見